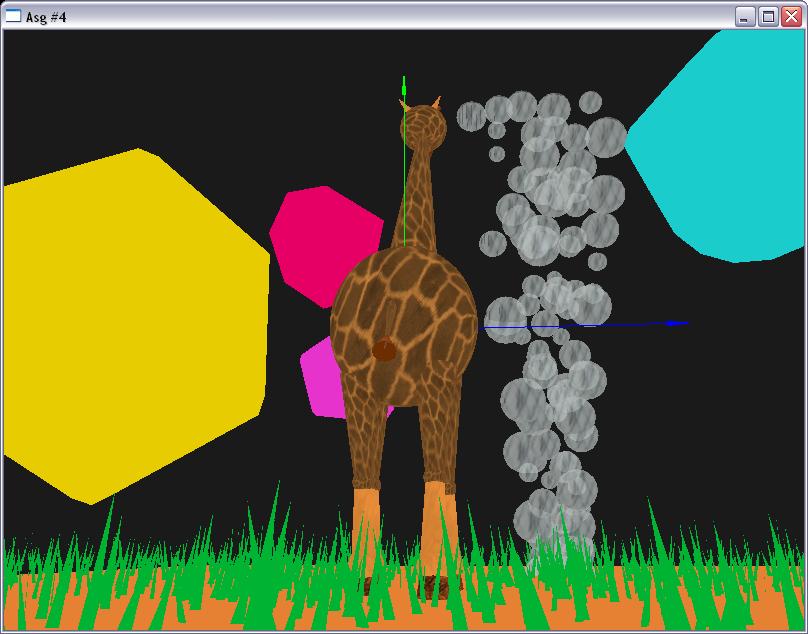
Comp 471: Asg 4: Smoke Cont.
 I worked some more on this, and now its final.
I worked some more on this, and now its final.
 I worked some more on this, and now its final.
I worked some more on this, and now its final.
posted by sE at
7:26 PM
7 Comments
![]()
-- email your questions - sE
I worked some more on this, and now its final.
posted by sE at
7:26 PM
7 Comments
![]()

posted by sE at
4:14 PM
0 Comments
![]()

posted by sE at
11:07 AM
0 Comments
![]()
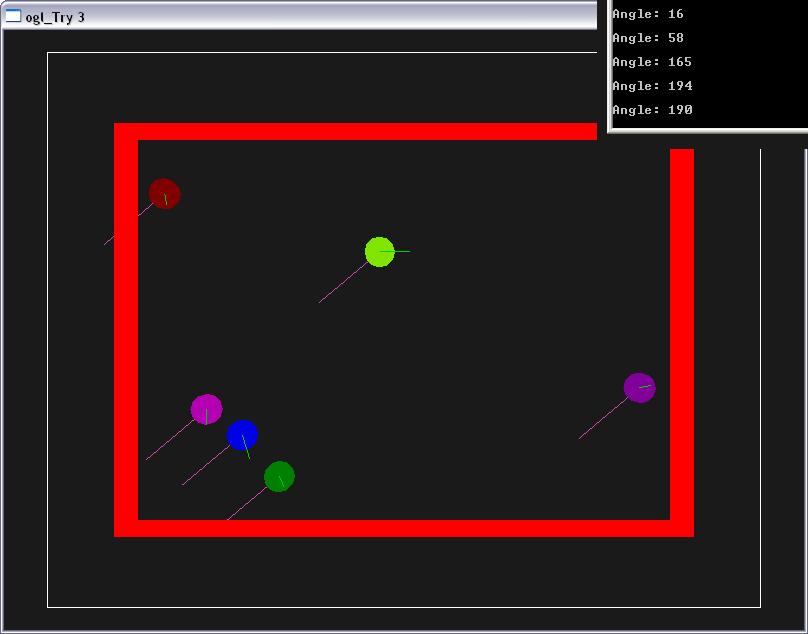 These are copies of an AI mind I've coded.
These are copies of an AI mind I've coded.
posted by sE at
10:39 AM
0 Comments
![]()


posted by sE at
10:16 AM
0 Comments
![]()

posted by sE at
10:10 AM
0 Comments
![]()

void drawPlane(int w, int h)
{
int i, j;
float dw = 1.0 / w;
float dh = 1.0 / h;
glNormal3f(0.0, 0.0, 1.0);
for (j = 0; j < h; ++j) {
glBegin(GL_TRIANGLE_STRIP);
for (i = 0; i <= w; ++i) {
glVertex2f(dw * i, dh * (j + 1));
glVertex2f(dw * i, dh * j);
}
glEnd();
}
}
posted by sE at
9:58 AM
0 Comments
![]()
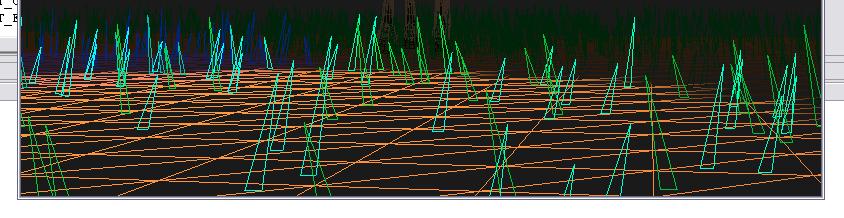
2: Speedfloat grassBreeze( void )
{
static int t = 0;
return (cos(fPI * (t += 2)/360)*6)/50+0.4;
}

posted by sE at
9:46 AM
0 Comments
![]()

Subscribe to
Posts [Atom]

